Het karakteriseren van de kinematica van de voet gebeurt aan de hand van een voetmodel. Gedurende de afgelopen 10 jaar zijn er een overvloed aan voetmodellen ontwikkeld en is er een consensus gegroeid dat de voet gemodelleerd kan worden als een klein aantal segmenten [Foot models for clinical gait analysis (Baker et al, 2006)]. Deze segmenten worden als onbuigzame elementen beschouwd. Het verloop van de hoeken tussen deze segmenten en de bijbehorende rotatieassen verschaffen inzicht in de kinematica van de voet.
Tot op heden werd de ontwikkeling van multi-segment modellen voornamelijk gebaseerd op de beweging van anatomische landmarks, geregistreerd via een set van markers. Afhankelijk van het model wordt de voetbeweging gemodelleerd met 3 tot 8 segmenten.
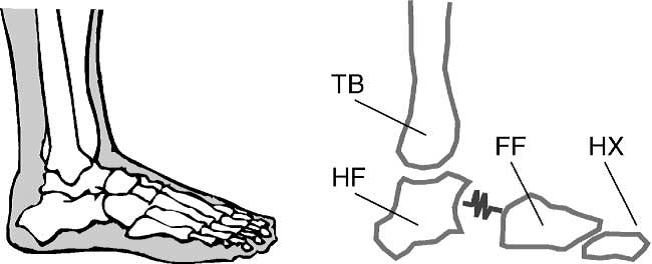
Voorbeeld: Oxford Voetmodel
In het APPLODYNSCA project zal er een gelijkaardig multi-segment voet model gedefinieerd worden, gebaseerd op dynamische 3D oppervlakte scans. Vermits deze aanpak gebruik maakt van gedetailleerde gegevens van het voet oppervlak tijdens de afrol, laat deze methode toe om de voet kinematica nauwkeuriger en vollediger te modelleren dan mogelijk is met marker gebaseerde systemen of 2D analyse methodes.
Het model berekent de kinematische parameters die de verandering van de voetvorm representeert tijdens wandelen. Het model kan toegepast worden in verschillende domeinen: biomechanische analyse, sportmedische raadplegingen, behandeling van voetproblemen, het ontwerpen van ortheses, … .
